Extrapolation tips and tricks#
Handling of extrapolation—evaluation of the interpolators on query
points outside of the domain of interpolated data—is not fully
consistent among different routines in scipy.interpolate. Different
interpolators use different sets of keyword arguments to control the behavior
outside of the data domain: some use extrapolate=True/False/None, some
allow the fill_value keyword. Refer to the API documentation for details
for each specific interpolation routine.
Depending on a particular problem, the available keywords may or may not be sufficient. Special attention needs to be paid to extrapolation of non-linear interpolants. Very often the extrapolated results make less sense with increasing distance from the data domain. This is of course to be expected: an interpolant only knows the data within the data domain.
When the default extrapolated results are not adequate, users need to implement the desired extrapolation mode themselves.
In this tutorial, we consider several worked examples where we demonstrate both the use of available keywords and manual implementation of desired extrapolation modes. These examples may or may not be applicable to your particular problem; they are not necessarily best practices; and they are deliberately pared down to bare essentials needed to demonstrate the main ideas, in a hope that they serve as an inspiration for your handling of your particular problem.
Note
The extrapolate argument is covered in detail in the
1-D interpolation tutorial.
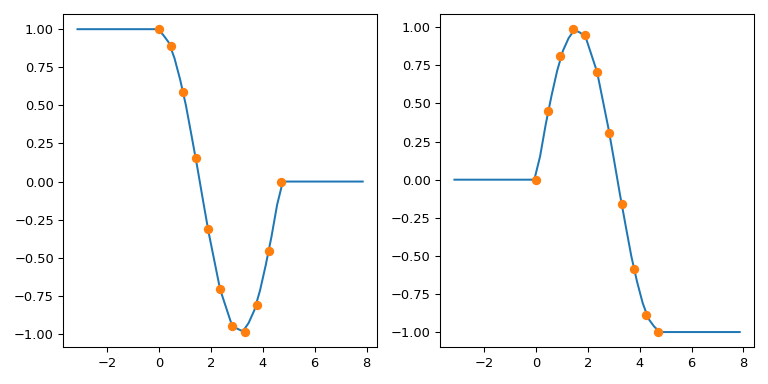
Replicate numpy.interp left and right fill values#
numpy.interp uses constant extrapolation, and defaults to extending
the first and last values of the y array in the interpolation
interval: the output of np.interp(xnew, x, y) is y[0] for
xnew < x[0] and y[-1] for xnew > x[-1]. The values are also
controllable by optional left and right keyword arguments.
While scipy.interpolate interpolators do not offer this behavior out of the box,
it is straightforward to emulate manually: we first compute the interpolation, and
then explicitly fill the required values for xnew < min(x) and x > max(x) with
left and right, respectively.
To illustrate:
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import make_interp_spline
def clipped(xnew, func, x, y, left=None, right=None):
if left is None:
left = y[0]
if right is None:
right = y[-1]
ynew = func(xnew)
ynew[xnew < x[0]] = left
ynew[xnew > x[-1]] = right
return ynew
x = np.linspace(0, 1.5*np.pi, 11)
y = np.column_stack((np.cos(x), np.sin(x))) # y.shape is (11, 2)
bare_func = make_interp_spline(x, y)
xnew = np.linspace(-np.pi, 2.5*np.pi, 51)
ynew = clipped(xnew, bare_func, x, y)
fig, (ax1, ax2) = plt.subplots(1, 2, figsize=(8, 4))
ax1.plot(xnew, ynew[:, 0])
ax1.plot(x, y[:, 0], 'o')
ax2.plot(xnew, ynew[:, 1])
ax2.plot(x, y[:, 1], 'o')
plt.tight_layout()
The snippet above is straightforward to adapt for other ways of handling out-of-bounds values, such as raising errors; see also Manually implement the asymptotics for a variation where we match in-bounds interpolation with known out-of-bounds asymptotic functions.
CubicSpline extend the boundary conditions#
CubicSpline needs two extra boundary conditions, which are
controlled by the bc_type parameter. This parameter can either list
explicit values of derivatives at the edges, or use helpful aliases. For
instance, bc_type="clamped" sets the first derivatives to zero,
bc_type="natural" sets the second derivatives to zero (two other
recognized string values are “periodic” and “not-a-knot”)
While the extrapolation is controlled by the boundary condition, the
relation is not very intuitive. For instance, one can expect that for
bc_type="natural", the extrapolation is linear. This expectation is
too strong: each boundary condition sets the derivatives at a single
point, at the boundary only. Extrapolation is done from the first and
last polynomial pieces, which — for a natural spline — is a cubic with a
zero second derivative at a given point.
One other way of seeing why this expectation is too strong is to consider a dataset with only three data points, where the spline has two polynomial pieces. To extrapolate linearly, this expectation implies that both of these pieces are linear. But then, two linear pieces cannot match at a middle point with a continuous 2nd derivative! (Unless of course, if all three data points actually lie on a single straight line).
To illustrate the behavior we consider a synthetic dataset and compare several boundary conditions:
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import CubicSpline
xs = [1, 2, 3, 4, 5, 6, 7, 8]
ys = [4.5, 3.6, 1.6, 0.0, -3.3, -3.1, -1.8, -1.7]
notaknot = CubicSpline(xs, ys, bc_type='not-a-knot')
natural = CubicSpline(xs, ys, bc_type='natural')
clamped = CubicSpline(xs, ys, bc_type='clamped')
xnew = np.linspace(min(xs) - 4, max(xs) + 4, 101)
splines = [notaknot, natural, clamped]
titles = ['not-a-knot', 'natural', 'clamped']
fig, axs = plt.subplots(3, 3, figsize=(12, 12))
for i in [0, 1, 2]:
for j, spline, title in zip(range(3), splines, titles):
axs[i, j].plot(xs, spline(xs, nu=i),'o')
axs[i, j].plot(xnew, spline(xnew, nu=i),'-')
axs[i, j].set_title(f'{title}, deriv={i}')
plt.tight_layout()
plt.show()
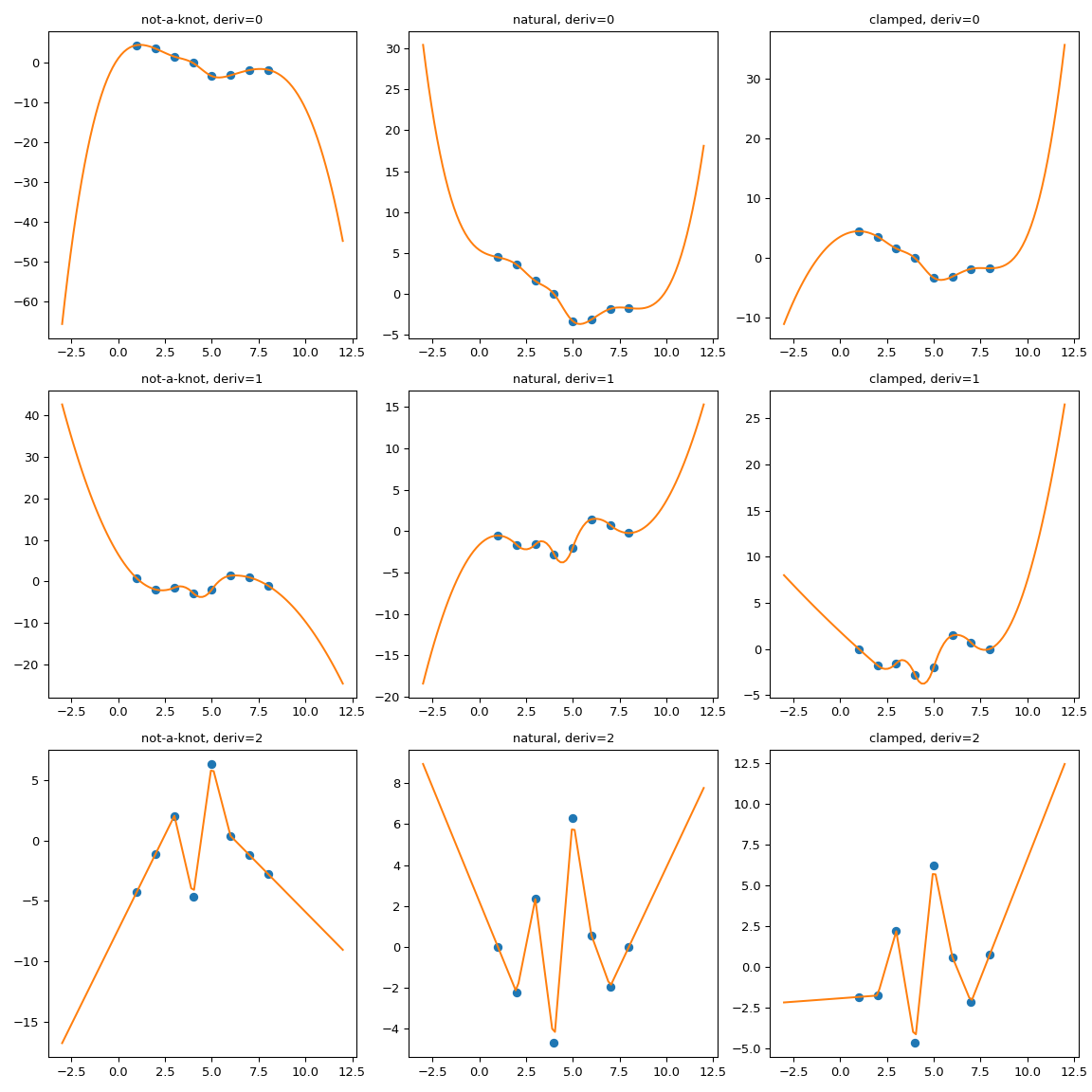
It is clearly seen that the natural spline does have the zero second
derivative at the boundaries, but extrapolation is non-linear.
bc_type="clamped" shows a similar behavior: first derivatives are only
equal to zero exactly at the boundary. In all cases, extrapolation is done by
extending the first and last polynomial pieces of the spline, whatever they
happen to be.
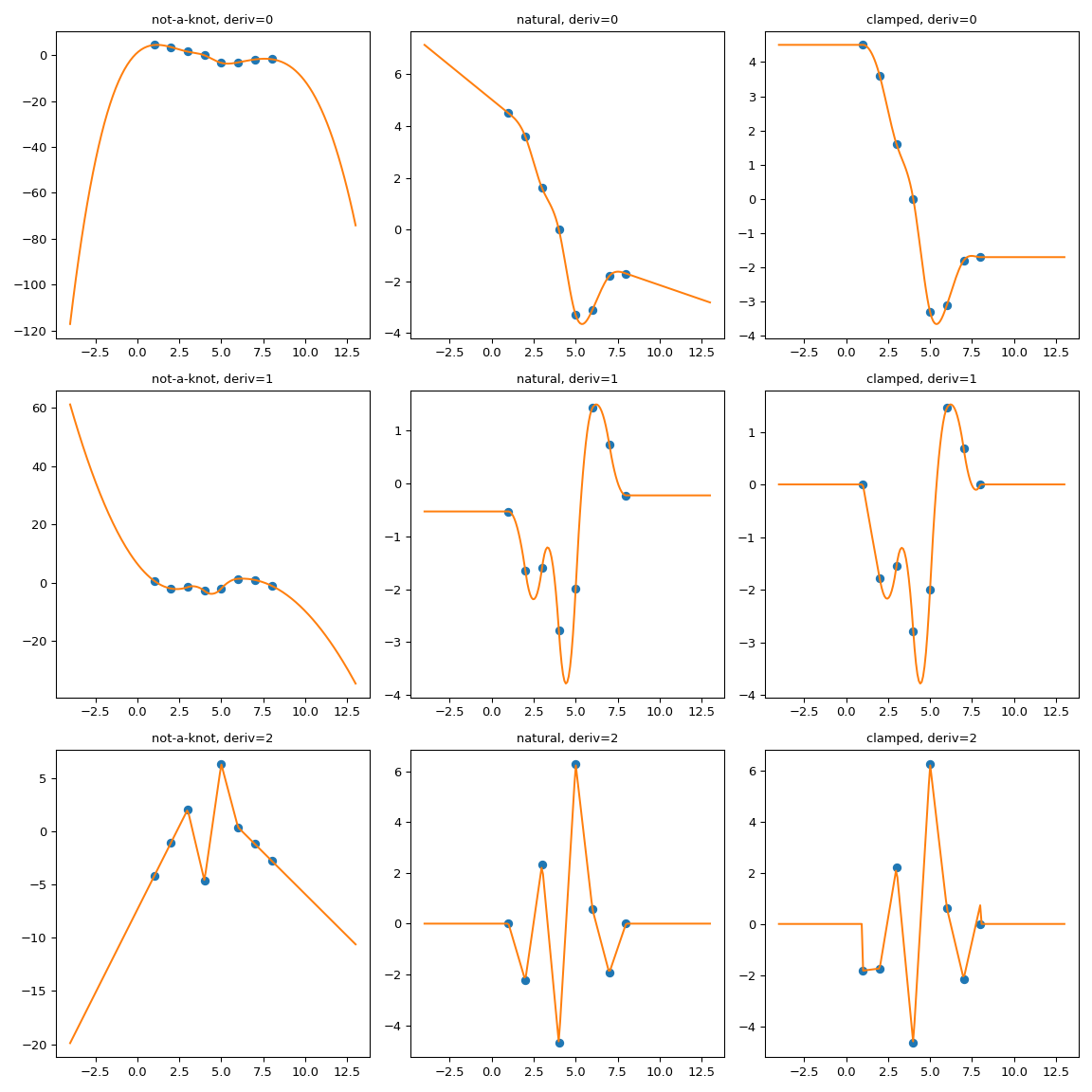
One possible way to force the extrapolation is to extend the interpolation domain to add first and last polynomial pieces which have desired properties.
Here we use extend method of the CubicSpline superclass,
PPoly, to add two extra breakpoints and to make sure that the additional
polynomial pieces maintain the values of the derivatives. Then the
extrapolation proceeds using these two additional intervals.
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import CubicSpline
def add_boundary_knots(spline):
"""
Add knots infinitesimally to the left and right.
Additional intervals are added to have zero 2nd and 3rd derivatives,
and to maintain the first derivative from whatever boundary condition
was selected. The spline is modified in place.
"""
# determine the slope at the left edge
leftx = spline.x[0]
lefty = spline(leftx)
leftslope = spline(leftx, nu=1)
# add a new breakpoint just to the left and use the
# known slope to construct the PPoly coefficients.
leftxnext = np.nextafter(leftx, leftx - 1)
leftynext = lefty + leftslope*(leftxnext - leftx)
leftcoeffs = np.array([0, 0, leftslope, leftynext])
spline.extend(leftcoeffs[..., None], np.r_[leftxnext])
# repeat with additional knots to the right
rightx = spline.x[-1]
righty = spline(rightx)
rightslope = spline(rightx,nu=1)
rightxnext = np.nextafter(rightx, rightx + 1)
rightynext = righty + rightslope * (rightxnext - rightx)
rightcoeffs = np.array([0, 0, rightslope, rightynext])
spline.extend(rightcoeffs[..., None], np.r_[rightxnext])
xs = [1, 2, 3, 4, 5, 6, 7, 8]
ys = [4.5, 3.6, 1.6, 0.0, -3.3, -3.1, -1.8, -1.7]
notaknot = CubicSpline(xs,ys, bc_type='not-a-knot')
# not-a-knot does not require additional intervals
natural = CubicSpline(xs,ys, bc_type='natural')
# extend the natural spline with linear extrapolating knots
add_boundary_knots(natural)
clamped = CubicSpline(xs,ys, bc_type='clamped')
# extend the clamped spline with constant extrapolating knots
add_boundary_knots(clamped)
xnew = np.linspace(min(xs) - 5, max(xs) + 5, 201)
fig, axs = plt.subplots(3, 3,figsize=(12,12))
splines = [notaknot, natural, clamped]
titles = ['not-a-knot', 'natural', 'clamped']
for i in [0, 1, 2]:
for j, spline, title in zip(range(3), splines, titles):
axs[i, j].plot(xs, spline(xs, nu=i),'o')
axs[i, j].plot(xnew, spline(xnew, nu=i),'-')
axs[i, j].set_title(f'{title}, deriv={i}')
plt.tight_layout()
plt.show()
Manually implement the asymptotics#
The previous trick of extending the interpolation domain relies on the
CubicSpline.extend method. A somewhat more general alternative is to
implement a wrapper which handles the out-of-bounds behavior explicitly.
Let us consider a worked example.
The setup#
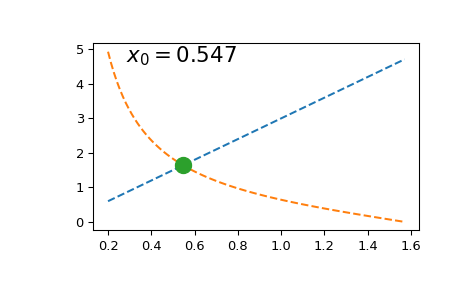
Suppose we want to solve at a given value of \(a\) the equation
(One application where these kinds of equations appear is solving for energy levels of a quantum particle). For simplicity, let’s only consider \(x\in (0, \pi/2)\).
Solving this equation once is straightforward:
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import brentq
def f(x, a):
return a*x - 1/np.tan(x)
a = 3
x0 = brentq(f, 1e-16, np.pi/2, args=(a,)) # here we shift the left edge
# by a machine epsilon to avoid
# a division by zero at x=0
xx = np.linspace(0.2, np.pi/2, 101)
plt.plot(xx, a*xx, '--')
plt.plot(xx, 1/np.tan(xx), '--')
plt.plot(x0, a*x0, 'o', ms=12)
plt.text(0.1, 0.9, fr'$x_0 = {x0:.3f}$',
transform=plt.gca().transAxes, fontsize=16)
plt.show()
However, if we need to solve it multiple times (e.g. to find a series
of roots due to periodicity of the tan function), repeated calls to
scipy.optimize.brentq become prohibitively expensive.
To circumvent this difficulty, we tabulate \(y = ax - 1/\tan{x}\) and interpolate it on the tabulated grid. In fact, we will use the inverse interpolation: we interpolate the values of \(x\) versus \(y\). This way, solving the original equation becomes simply an evaluation of the interpolated function at zero \(y\) argument.
To improve the interpolation accuracy we will use the knowledge of the
derivatives of the tabulated function. We will use
BPoly.from_derivatives to construct a cubic interpolant
(equivalently, we could have used CubicHermiteSpline)
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import BPoly
def f(x, a):
return a*x - 1/np.tan(x)
xleft, xright = 0.2, np.pi/2
x = np.linspace(xleft, xright, 11)
fig, ax = plt.subplots(1, 2, figsize=(12, 4))
for j, a in enumerate([3, 93]):
y = f(x, a)
dydx = a + 1./np.sin(x)**2 # d(ax - 1/tan(x)) / dx
dxdy = 1 / dydx # dx/dy = 1 / (dy/dx)
xdx = np.c_[x, dxdy]
spl = BPoly.from_derivatives(y, xdx) # inverse interpolation
yy = np.linspace(f(xleft, a), f(xright, a), 51)
ax[j].plot(yy, spl(yy), '--')
ax[j].plot(y, x, 'o')
ax[j].set_xlabel(r'$y$')
ax[j].set_ylabel(r'$x$')
ax[j].set_title(rf'$a = {a}$')
ax[j].plot(0, spl(0), 'o', ms=12)
ax[j].text(0.1, 0.85, fr'$x_0 = {spl(0):.3f}$',
transform=ax[j].transAxes, fontsize=18)
ax[j].grid(True)
plt.tight_layout()
plt.show()
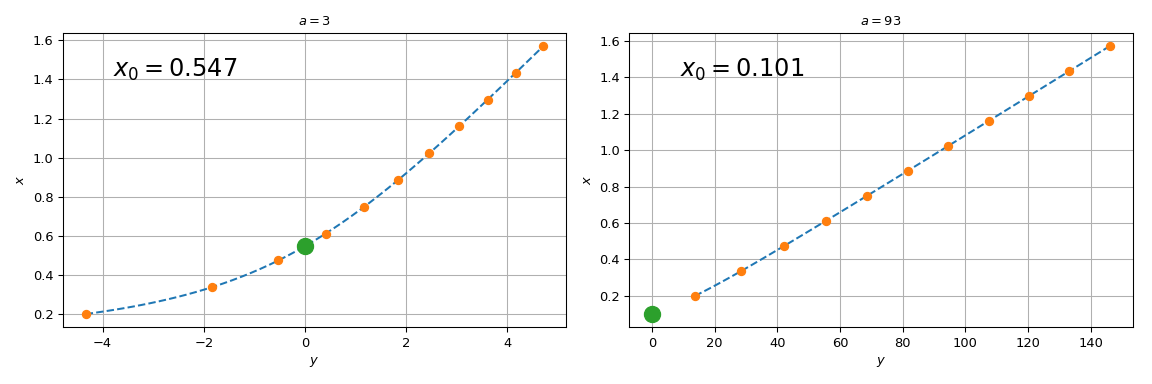
Note that for \(a=3\), spl(0) agrees with the brentq call
above, while for \(a = 93\), the difference is substantial. The
reason the procedure starts failing for large \(a\) is that the
straight line \(y = ax\) tends towards the vertical axis, and the
root of the original equation tends towards \(x=0\). Since we
tabulated the original function at a finite grid, spl(0) involves
extrapolation for too-large values of \(a\). Relying on
extrapolation is prone to losing accuracy and is best avoided.
Use the known asymptotics#
Looking at the original equation, we note that for \(x\to 0\), \(\tan(x) = x + O(x^3)\), and the original equation becomes
so that \(x_0 \approx 1/\sqrt{a}\) for \(a \gg 1\).
We will use this to cook up a class which switches from interpolation to using this known asymptotic behavior for out-of-range data. A bare-bones implementation may look like this
class RootWithAsymptotics:
def __init__(self, a):
# construct the interpolant
xleft, xright = 0.2, np.pi/2
x = np.linspace(xleft, xright, 11)
y = f(x, a)
dydx = a + 1./np.sin(x)**2 # d(ax - 1/tan(x)) / dx
dxdy = 1 / dydx # dx/dy = 1 / (dy/dx)
# inverse interpolation
self.spl = BPoly.from_derivatives(y, np.c_[x, dxdy])
self.a = a
def root(self):
out = self.spl(0)
asympt = 1./np.sqrt(self.a)
return np.where(self.spl.x.min() < asympt, out, asympt)
And then
>>> r = RootWithAsymptotics(93)
>>> r.root()
array(0.10369517)
which differs from the extrapolated result and agrees with the brentq call.
Note that this implementation is intentionally pared down. From the API
perspective, you may want to instead implement the __call__ method
so that the full dependence of x on y is available. From the
numerical perspective, more work is needed to make sure that the switch
between interpolation and asymptotics occurs deep enough into the
asymptotic regime, so that the resulting function is smooth enough at
the switch-over point.
Also in this example we artificially limited the problem to only
consider a single periodicity interval of the tan function, and only
dealt with \(a > 0\). For negative values of \(a\), we would need
to implement the other asymptotics, for \(x\to \pi\).
However the basic idea is the same.
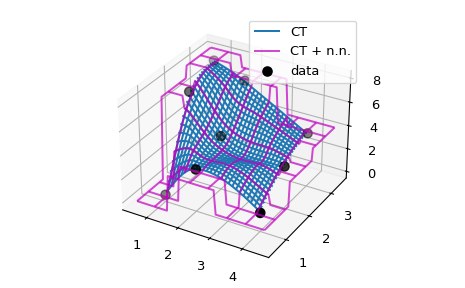
Extrapolation in D > 1#
The basic idea of implementing extrapolation manually in a wrapper class
or function can be easily generalized to higher dimensions. As an
example, we consider a C1-smooth interpolation problem of 2D data using
CloughTocher2DInterpolator. By default, it fills the out of bounds values
with nans, and we want to instead use for each query
point the value of its nearest neighbor.
Since CloughTocher2DInterpolator accepts either 2D data or a Delaunay
triangulation of the data points, the efficient way of finding nearest
neighbors of query points would be to construct the triangulation (using
scipy.spatial tools) and use it to find nearest neighbors on the convex hull
of the data.
We will instead use a simpler, naive method and rely on looping over the whole dataset using NumPy broadcasting.
import numpy as np
import matplotlib.pyplot as plt
from scipy.interpolate import CloughTocher2DInterpolator as CT
def my_CT(xy, z):
"""CT interpolator + nearest-neighbor extrapolation.
Parameters
----------
xy : ndarray, shape (npoints, ndim)
Coordinates of data points
z : ndarray, shape (npoints)
Values at data points
Returns
-------
func : callable
A callable object which mirrors the CT behavior,
with an additional neareast-neighbor extrapolation
outside of the data range.
"""
x = xy[:, 0]
y = xy[:, 1]
f = CT(xy, z)
# this inner function will be returned to a user
def new_f(xx, yy):
# evaluate the CT interpolator. Out-of-bounds values are nan.
zz = f(xx, yy)
nans = np.isnan(zz)
if nans.any():
# for each nan point, find its nearest neighbor
inds = np.argmin(
(x[:, None] - xx[nans])**2 +
(y[:, None] - yy[nans])**2
, axis=0)
# ... and use its value
zz[nans] = z[inds]
return zz
return new_f
# Now illustrate the difference between the original ``CT`` interpolant
# and ``my_CT`` on a small example:
x = np.array([1, 1, 1, 2, 2, 2, 4, 4, 4])
y = np.array([1, 2, 3, 1, 2, 3, 1, 2, 3])
z = np.array([0, 7, 8, 3, 4, 7, 1, 3, 4])
xy = np.c_[x, y]
lut = CT(xy, z)
lut2 = my_CT(xy, z)
X = np.linspace(min(x) - 0.5, max(x) + 0.5, 71)
Y = np.linspace(min(y) - 0.5, max(y) + 0.5, 71)
X, Y = np.meshgrid(X, Y)
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
ax.plot_wireframe(X, Y, lut(X, Y), label='CT')
ax.plot_wireframe(X, Y, lut2(X, Y), color='m',
cstride=10, rstride=10, alpha=0.7, label='CT + n.n.')
ax.scatter(x, y, z, 'o', color='k', s=48, label='data')
ax.legend()
plt.tight_layout()