maximum_filter#
- scipy.ndimage.maximum_filter(input, size=None, footprint=None, output=None, mode='reflect', cval=0.0, origin=0, *, axes=None)[source]#
Calculate a multidimensional maximum filter.
- Parameters:
- inputarray_like
The input array.
- sizescalar or tuple, optional
See footprint, below. Ignored if footprint is given.
- footprintarray, optional
Either size or footprint must be defined. size gives the shape that is taken from the input array, at every element position, to define the input to the filter function. footprint is a boolean array that specifies (implicitly) a shape, but also which of the elements within this shape will get passed to the filter function. Thus
size=(n,m)is equivalent tofootprint=np.ones((n,m)). We adjust size to the number of dimensions of the input array, so that, if the input array is shape (10,10,10), and size is 2, then the actual size used is (2,2,2). When footprint is given, size is ignored.- outputarray or dtype, optional
The array in which to place the output, or the dtype of the returned array. By default an array of the same dtype as input will be created.
- modestr or sequence, optional
The mode parameter determines how the input array is extended when the filter overlaps a border. By passing a sequence of modes with length equal to the number of dimensions of the input array, different modes can be specified along each axis. Default value is ‘reflect’. The valid values and their behavior is as follows:
- ‘reflect’ (d c b a | a b c d | d c b a)
The input is extended by reflecting about the edge of the last pixel. This mode is also sometimes referred to as half-sample symmetric.
- ‘constant’ (k k k k | a b c d | k k k k)
The input is extended by filling all values beyond the edge with the same constant value, defined by the cval parameter.
- ‘nearest’ (a a a a | a b c d | d d d d)
The input is extended by replicating the last pixel.
- ‘mirror’ (d c b | a b c d | c b a)
The input is extended by reflecting about the center of the last pixel. This mode is also sometimes referred to as whole-sample symmetric.
- ‘wrap’ (a b c d | a b c d | a b c d)
The input is extended by wrapping around to the opposite edge.
For consistency with the interpolation functions, the following mode names can also be used:
- ‘grid-constant’
This is a synonym for ‘constant’.
- ‘grid-mirror’
This is a synonym for ‘reflect’.
- ‘grid-wrap’
This is a synonym for ‘wrap’.
- cvalscalar, optional
Value to fill past edges of input if mode is ‘constant’. Default is 0.0.
- originint or sequence, optional
Controls the placement of the filter on the input array’s pixels. A value of 0 (the default) centers the filter over the pixel, with positive values shifting the filter to the left, and negative ones to the right. By passing a sequence of origins with length equal to the number of dimensions of the input array, different shifts can be specified along each axis.
- axestuple of int or None, optional
If None, input is filtered along all axes. Otherwise, input is filtered along the specified axes. When axes is specified, any tuples used for size, origin, and/or mode must match the length of axes. The ith entry in any of these tuples corresponds to the ith entry in axes.
- Returns:
- maximum_filterndarray
Filtered array. Has the same shape as input.
Notes
A sequence of modes (one per axis) is only supported when the footprint is separable. Otherwise, a single mode string must be provided.
The behavior of this function with NaN elements is undefined. To control behavior in the presence of NaNs, consider using
vectorized_filter.Array API Standard Support
maximum_filterhas experimental support for Python Array API Standard compatible backends in addition to NumPy. Please consider testing these features by setting an environment variableSCIPY_ARRAY_API=1and providing CuPy, PyTorch, JAX, or Dask arrays as array arguments. The following combinations of backend and device (or other capability) are supported.Library
CPU
GPU
NumPy
✅
n/a
CuPy
n/a
✅
PyTorch
✅
⛔
JAX
⚠️ no JIT
⛔
Dask
⚠️ computes graph
n/a
See Support for the array API standard for more information.
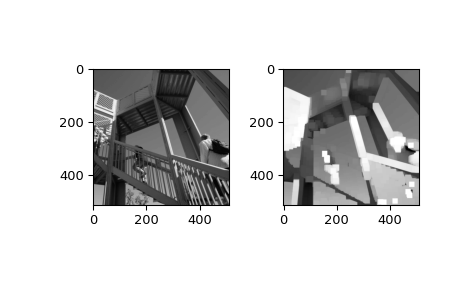
Examples
>>> from scipy import ndimage, datasets >>> import matplotlib.pyplot as plt >>> fig = plt.figure() >>> plt.gray() # show the filtered result in grayscale >>> ax1 = fig.add_subplot(121) # left side >>> ax2 = fig.add_subplot(122) # right side >>> ascent = datasets.ascent() >>> result = ndimage.maximum_filter(ascent, size=20) >>> ax1.imshow(ascent) >>> ax2.imshow(result) >>> plt.show()