spline_filter#
- scipy.ndimage.spline_filter(input, order=3, output=<class 'numpy.float64'>, mode='mirror')[source]#
Multidimensional spline filter.
- Parameters:
- inputarray_like
The input array.
- orderint, optional
The order of the spline, default is 3.
- outputndarray or dtype, optional
The array in which to place the output, or the dtype of the returned array. Default is
numpy.float64.- mode{‘reflect’, ‘grid-mirror’, ‘constant’, ‘grid-constant’, ‘nearest’, ‘mirror’, ‘grid-wrap’, ‘wrap’}, optional
The mode parameter determines how the input array is extended beyond its boundaries. Default is ‘mirror’. Behavior for each valid value is as follows (see additional plots and details on boundary modes):
- ‘reflect’ (d c b a | a b c d | d c b a)
The input is extended by reflecting about the edge of the last pixel. This mode is also sometimes referred to as half-sample symmetric.
- ‘grid-mirror’
This is a synonym for ‘reflect’.
- ‘constant’ (k k k k | a b c d | k k k k)
The input is extended by filling all values beyond the edge with the same constant value, defined by the cval parameter. No interpolation is performed beyond the edges of the input.
- ‘grid-constant’ (k k k k | a b c d | k k k k)
The input is extended by filling all values beyond the edge with the same constant value, defined by the cval parameter. Interpolation occurs for samples outside the input’s extent as well.
- ‘nearest’ (a a a a | a b c d | d d d d)
The input is extended by replicating the last pixel.
- ‘mirror’ (d c b | a b c d | c b a)
The input is extended by reflecting about the center of the last pixel. This mode is also sometimes referred to as whole-sample symmetric.
- ‘grid-wrap’ (a b c d | a b c d | a b c d)
The input is extended by wrapping around to the opposite edge.
- ‘wrap’ (d b c d | a b c d | b c a b)
The input is extended by wrapping around to the opposite edge, but in a way such that the last point and initial point exactly overlap. In this case it is not well defined which sample will be chosen at the point of overlap.
- Returns:
- spline_filterndarray
Filtered array. Has the same shape as input.
See also
spline_filter1dCalculate a 1-D spline filter along the given axis.
Notes
The multidimensional filter is implemented as a sequence of 1-D spline filters. The intermediate arrays are stored in the same data type as the output. Therefore, for output types with a limited precision, the results may be imprecise because intermediate results may be stored with insufficient precision.
For complex-valued input, this function processes the real and imaginary components independently.
Added in version 1.6.0: Complex-valued support added.
Examples
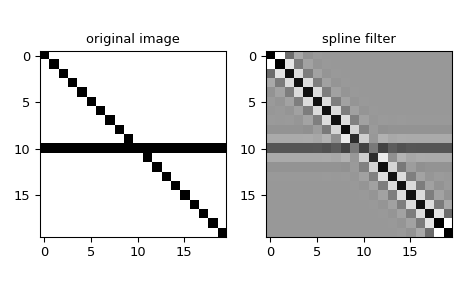
We can filter an image using multidimentional splines:
>>> from scipy.ndimage import spline_filter >>> import numpy as np >>> import matplotlib.pyplot as plt >>> orig_img = np.eye(20) # create an image >>> orig_img[10, :] = 1.0 >>> sp_filter = spline_filter(orig_img, order=3) >>> f, ax = plt.subplots(1, 2, sharex=True) >>> for ind, data in enumerate([[orig_img, "original image"], ... [sp_filter, "spline filter"]]): ... ax[ind].imshow(data[0], cmap='gray_r') ... ax[ind].set_title(data[1]) >>> plt.tight_layout() >>> plt.show()