scipy.integrate.odeint¶
-
scipy.integrate.odeint(func, y0, t, args=(), Dfun=None, col_deriv=0, full_output=0, ml=None, mu=None, rtol=None, atol=None, tcrit=None, h0=0.0, hmax=0.0, hmin=0.0, ixpr=0, mxstep=0, mxhnil=0, mxordn=12, mxords=5, printmessg=0, tfirst=False)[source]¶ Integrate a system of ordinary differential equations.
Note
For new code, use
scipy.integrate.solve_ivpto solve a differential equation.Solve a system of ordinary differential equations using lsoda from the FORTRAN library odepack.
Solves the initial value problem for stiff or non-stiff systems of first order ode-s:
dy/dt = func(y, t, ...) [or func(t, y, ...)]
where y can be a vector.
Note
By default, the required order of the first two arguments of func are in the opposite order of the arguments in the system definition function used by the
scipy.integrate.odeclass and the functionscipy.integrate.solve_ivp. To use a function with the signaturefunc(t, y, ...), the argument tfirst must be set toTrue.Parameters: - func : callable(y, t, …) or callable(t, y, …)
Computes the derivative of y at t. If the signature is
callable(t, y, ...), then the argument tfirst must be setTrue.- y0 : array
Initial condition on y (can be a vector).
- t : array
A sequence of time points for which to solve for y. The initial value point should be the first element of this sequence.
- args : tuple, optional
Extra arguments to pass to function.
- Dfun : callable(y, t, …) or callable(t, y, …)
Gradient (Jacobian) of func. If the signature is
callable(t, y, ...), then the argument tfirst must be setTrue.- col_deriv : bool, optional
True if Dfun defines derivatives down columns (faster), otherwise Dfun should define derivatives across rows.
- full_output : bool, optional
True if to return a dictionary of optional outputs as the second output
- printmessg : bool, optional
Whether to print the convergence message
- tfirst: bool, optional
If True, the first two arguments of func (and Dfun, if given) must
t, yinstead of the defaulty, t.New in version 1.1.0.
Returns: - y : array, shape (len(t), len(y0))
Array containing the value of y for each desired time in t, with the initial value y0 in the first row.
- infodict : dict, only returned if full_output == True
Dictionary containing additional output information
key meaning ‘hu’ vector of step sizes successfully used for each time step. ‘tcur’ vector with the value of t reached for each time step. (will always be at least as large as the input times). ‘tolsf’ vector of tolerance scale factors, greater than 1.0, computed when a request for too much accuracy was detected. ‘tsw’ value of t at the time of the last method switch (given for each time step) ‘nst’ cumulative number of time steps ‘nfe’ cumulative number of function evaluations for each time step ‘nje’ cumulative number of jacobian evaluations for each time step ‘nqu’ a vector of method orders for each successful step. ‘imxer’ index of the component of largest magnitude in the weighted local error vector (e / ewt) on an error return, -1 otherwise. ‘lenrw’ the length of the double work array required. ‘leniw’ the length of integer work array required. ‘mused’ a vector of method indicators for each successful time step: 1: adams (nonstiff), 2: bdf (stiff)
Other Parameters: - ml, mu : int, optional
If either of these are not None or non-negative, then the Jacobian is assumed to be banded. These give the number of lower and upper non-zero diagonals in this banded matrix. For the banded case, Dfun should return a matrix whose rows contain the non-zero bands (starting with the lowest diagonal). Thus, the return matrix jac from Dfun should have shape
(ml + mu + 1, len(y0))whenml >=0ormu >=0. The data in jac must be stored such thatjac[i - j + mu, j]holds the derivative of the i`th equation with respect to the `j`th state variable. If `col_deriv is True, the transpose of this jac must be returned.- rtol, atol : float, optional
The input parameters rtol and atol determine the error control performed by the solver. The solver will control the vector, e, of estimated local errors in y, according to an inequality of the form
max-norm of (e / ewt) <= 1, where ewt is a vector of positive error weights computed asewt = rtol * abs(y) + atol. rtol and atol can be either vectors the same length as y or scalars. Defaults to 1.49012e-8.- tcrit : ndarray, optional
Vector of critical points (e.g. singularities) where integration care should be taken.
- h0 : float, (0: solver-determined), optional
The step size to be attempted on the first step.
- hmax : float, (0: solver-determined), optional
The maximum absolute step size allowed.
- hmin : float, (0: solver-determined), optional
The minimum absolute step size allowed.
- ixpr : bool, optional
Whether to generate extra printing at method switches.
- mxstep : int, (0: solver-determined), optional
Maximum number of (internally defined) steps allowed for each integration point in t.
- mxhnil : int, (0: solver-determined), optional
Maximum number of messages printed.
- mxordn : int, (0: solver-determined), optional
Maximum order to be allowed for the non-stiff (Adams) method.
- mxords : int, (0: solver-determined), optional
Maximum order to be allowed for the stiff (BDF) method.
See also
Examples
The second order differential equation for the angle theta of a pendulum acted on by gravity with friction can be written:
theta''(t) + b*theta'(t) + c*sin(theta(t)) = 0
where b and c are positive constants, and a prime (‘) denotes a derivative. To solve this equation with
odeint, we must first convert it to a system of first order equations. By defining the angular velocityomega(t) = theta'(t), we obtain the system:theta'(t) = omega(t) omega'(t) = -b*omega(t) - c*sin(theta(t))
Let y be the vector [theta, omega]. We implement this system in python as:
>>> def pend(y, t, b, c): ... theta, omega = y ... dydt = [omega, -b*omega - c*np.sin(theta)] ... return dydt ...
We assume the constants are b = 0.25 and c = 5.0:
>>> b = 0.25 >>> c = 5.0
For initial conditions, we assume the pendulum is nearly vertical with theta(0) = pi - 0.1, and is initially at rest, so omega(0) = 0. Then the vector of initial conditions is
>>> y0 = [np.pi - 0.1, 0.0]
We will generate a solution at 101 evenly spaced samples in the interval 0 <= t <= 10. So our array of times is:
>>> t = np.linspace(0, 10, 101)
Call
odeintto generate the solution. To pass the parameters b and c to pend, we give them toodeintusing the args argument.>>> from scipy.integrate import odeint >>> sol = odeint(pend, y0, t, args=(b, c))
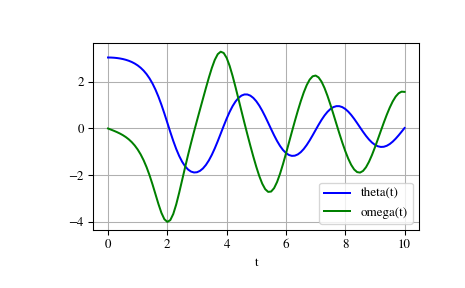
The solution is an array with shape (101, 2). The first column is theta(t), and the second is omega(t). The following code plots both components.
>>> import matplotlib.pyplot as plt >>> plt.plot(t, sol[:, 0], 'b', label='theta(t)') >>> plt.plot(t, sol[:, 1], 'g', label='omega(t)') >>> plt.legend(loc='best') >>> plt.xlabel('t') >>> plt.grid() >>> plt.show()