scipy.signal.lsim¶
- scipy.signal.lsim(system, U, T, X0=None, interp=True)[source]¶
Simulate output of a continuous-time linear system.
Parameters: system : an instance of the LTI class or a tuple describing the system.
The following gives the number of elements in the tuple and the interpretation:
- 2: (num, den)
- 3: (zeros, poles, gain)
- 4: (A, B, C, D)
U : array_like
An input array describing the input at each time T (interpolation is assumed between given times). If there are multiple inputs, then each column of the rank-2 array represents an input. If U = 0 or None, a zero input is used.
T : array_like
The time steps at which the input is defined and at which the output is desired. Must be nonnegative, increasing, and equally spaced.
X0 : array_like, optional
The initial conditions on the state vector (zero by default).
interp : bool, optional
Whether to use linear (True, the default) or zero-order-hold (False) interpolation for the input array.
Returns: T : 1D ndarray
Time values for the output.
yout : 1D ndarray
System response.
xout : ndarray
Time evolution of the state vector.
Examples
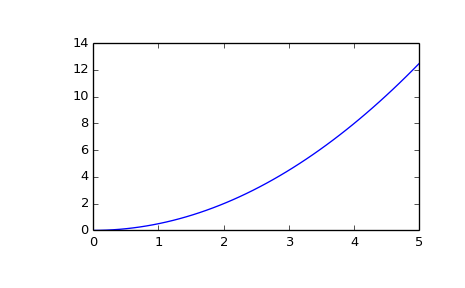
Simulate a double integrator y’’ = u, with a constant input u = 1
>>> from scipy import signal >>> system = signal.lti([[0., 1.], [0., 0.]], [[0.], [1.]], [[1., 0.]], 0.) >>> t = np.linspace(0, 5) >>> u = np.ones_like(t) >>> tout, y, x = signal.lsim(system, u, t) >>> import matplotlib.pyplot as plt >>> plt.plot(t, y)