lstsq#
- scipy.linalg.lstsq(a, b, cond=None, overwrite_a=False, overwrite_b=False, check_finite=True, lapack_driver=None)[source]#
Compute least-squares solution to the equation
a @ x = b.Compute a vector x such that the 2-norm
|b - A x|is minimized.The documentation is written assuming array arguments are of specified “core” shapes. However, array argument(s) of this function may have additional “batch” dimensions prepended to the core shape. In this case, the array is treated as a batch of lower-dimensional slices; see Batched Linear Operations for details.
- Parameters:
- a(M, N) array_like
Left-hand side array
- b(M,) or (M, K) array_like
Right hand side array
- condfloat, optional
Cutoff for ‘small’ singular values; used to determine effective rank of a. Singular values smaller than
cond * largest_singular_valueare considered zero.- overwrite_abool, optional
Discard data in a (may enhance performance). Default is False.
- overwrite_bbool, optional
Discard data in b (may enhance performance). Default is False.
- check_finitebool, optional
Whether to check that the input matrices contain only finite numbers. Disabling may give a performance gain, but may result in problems (crashes, non-termination) if the inputs do contain infinities or NaNs.
- lapack_driverstr, optional
Which LAPACK driver is used to solve the least-squares problem. Options are
'gelsd','gelsy','gelss'. Default ('gelsd') is a good choice. However,'gelsy'can be slightly faster on many problems.'gelss'was used historically. It is generally slow but uses less memory.Added in version 0.17.0.
- Returns:
- x(N,) or (N, K) ndarray
Least-squares solution.
- residues(K,) ndarray or float
Square of the 2-norm for each column in
b - a x, ifM > Nandrank(A) == n(returns a scalar ifbis 1-D). Otherwise a (0,)-shaped array is returned.- rankint
Effective rank of a.
- s(min(M, N),) ndarray or None
Singular values of a. The condition number of
aiss[0] / s[-1].
- Raises:
- LinAlgError
If computation does not converge.
- ValueError
When parameters are not compatible.
See also
scipy.optimize.nnlslinear least squares with non-negativity constraint
Notes
When
'gelsy'is used as a driver, residues is set to a (0,)-shaped array and s is alwaysNone.Examples
>>> import numpy as np >>> from scipy.linalg import lstsq >>> import matplotlib.pyplot as plt
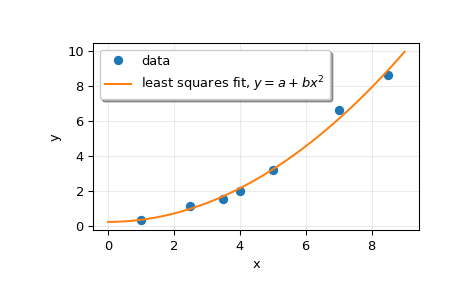
Suppose we have the following data:
>>> x = np.array([1, 2.5, 3.5, 4, 5, 7, 8.5]) >>> y = np.array([0.3, 1.1, 1.5, 2.0, 3.2, 6.6, 8.6])
We want to fit a quadratic polynomial of the form
y = a + b*x**2to this data. We first form the “design matrix” M, with a constant column of 1s and a column containingx**2:>>> M = x[:, np.newaxis]**[0, 2] >>> M array([[ 1. , 1. ], [ 1. , 6.25], [ 1. , 12.25], [ 1. , 16. ], [ 1. , 25. ], [ 1. , 49. ], [ 1. , 72.25]])
We want to find the least-squares solution to
M.dot(p) = y, wherepis a vector with length 2 that holds the parametersaandb.>>> p, res, rnk, s = lstsq(M, y) >>> p array([ 0.20925829, 0.12013861])
Plot the data and the fitted curve.
>>> plt.plot(x, y, 'o', label='data') >>> xx = np.linspace(0, 9, 101) >>> yy = p[0] + p[1]*xx**2 >>> plt.plot(xx, yy, label='least squares fit, $y = a + bx^2$') >>> plt.xlabel('x') >>> plt.ylabel('y') >>> plt.legend(framealpha=1, shadow=True) >>> plt.grid(alpha=0.25) >>> plt.show()